04. RGB-D Cameras
RGB-D Cameras
An RGB-D camera combines best of the active and passive sensor worlds, in that it consists of a passive RGB camera along with an active depth sensor. An RGB-D camera, unlike a conventional camera, provides per-pixel depth information in addition to an RGB image.
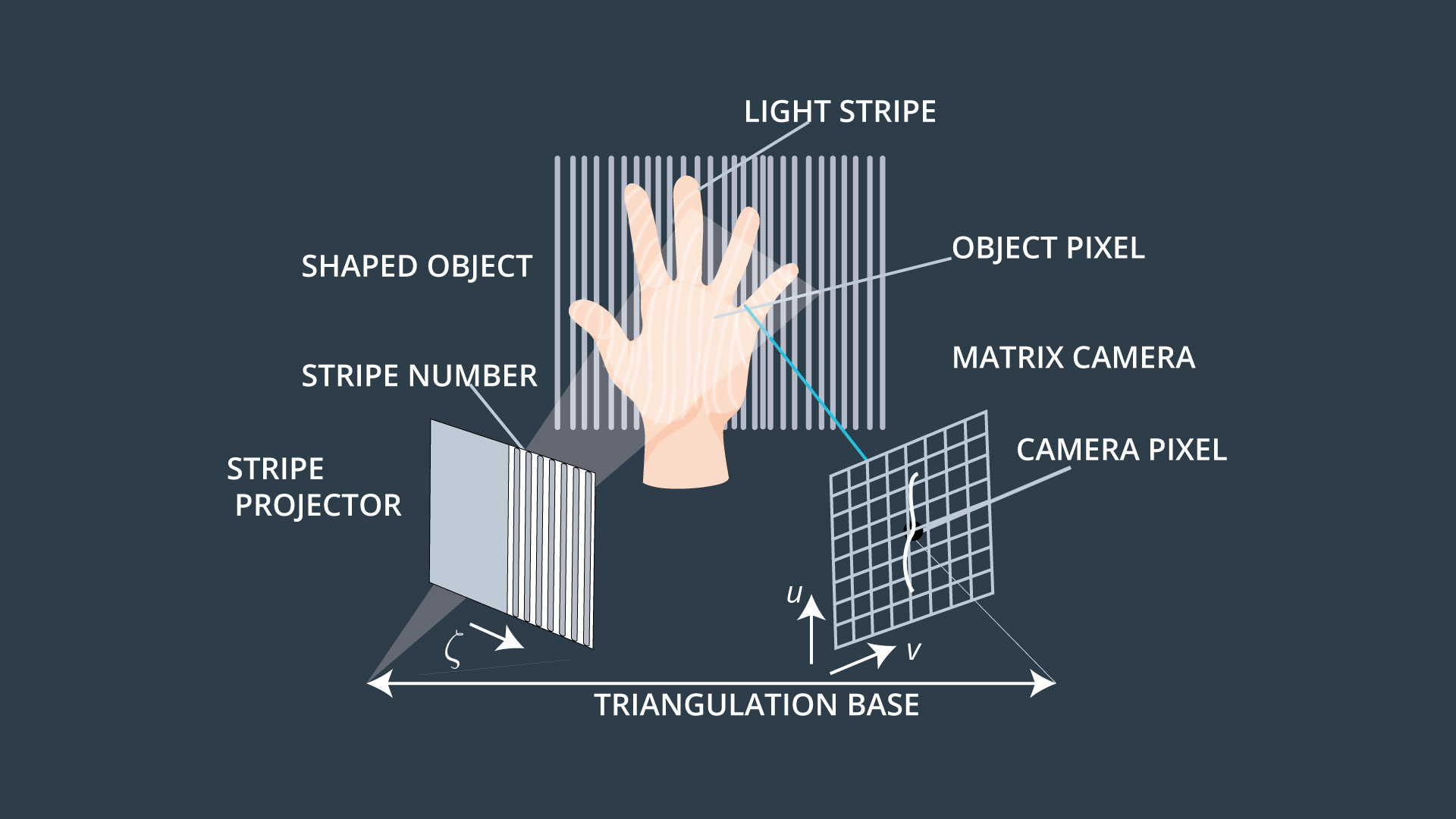
Traditionally, the active depth sensor is an infrared (IR) projector and receiver. Much like a Continuous Wave Time of Flight sensor, an RGB-D camera calculates depth by emitting a light signal on the scene and analyzing the reflected light, but the incident wave modulation is performed spatially instead of temporally.
Here we can see an example of a standard RGB-D Camera:
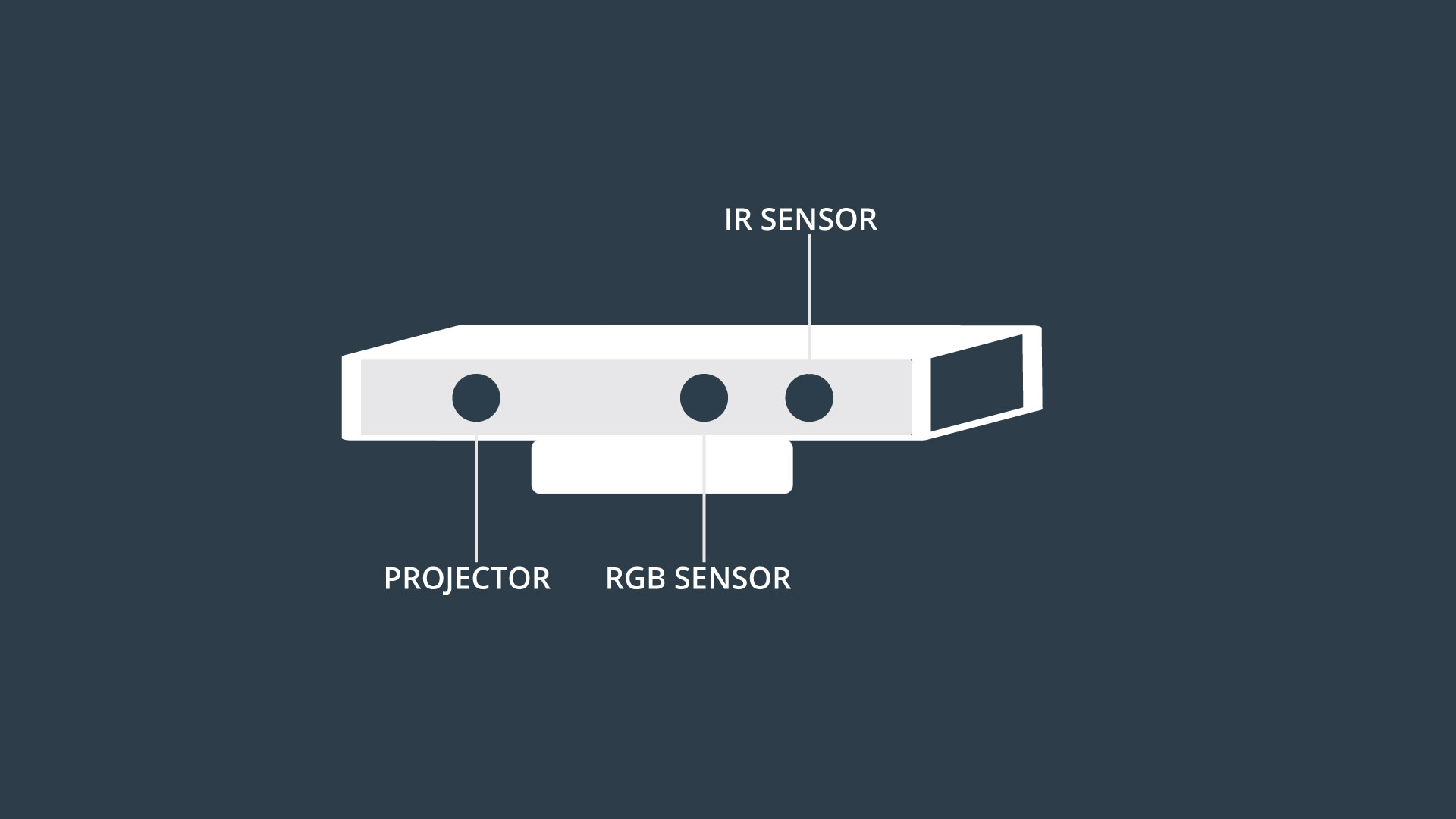
This is done by projecting light out of the IR transmitter in a predefined pattern and calculating the depth by interpreting the deformation in that pattern caused by the surface of target objects. These patterns range from simple stripes to unique and convoluted speckle patterns.
The advantage of using RGB-D cameras for 3D perception is that, unlike stereo cameras, they save a lot of computational resources by providing per-pixel depth values directly instead of inferring the depth information from raw image frames.
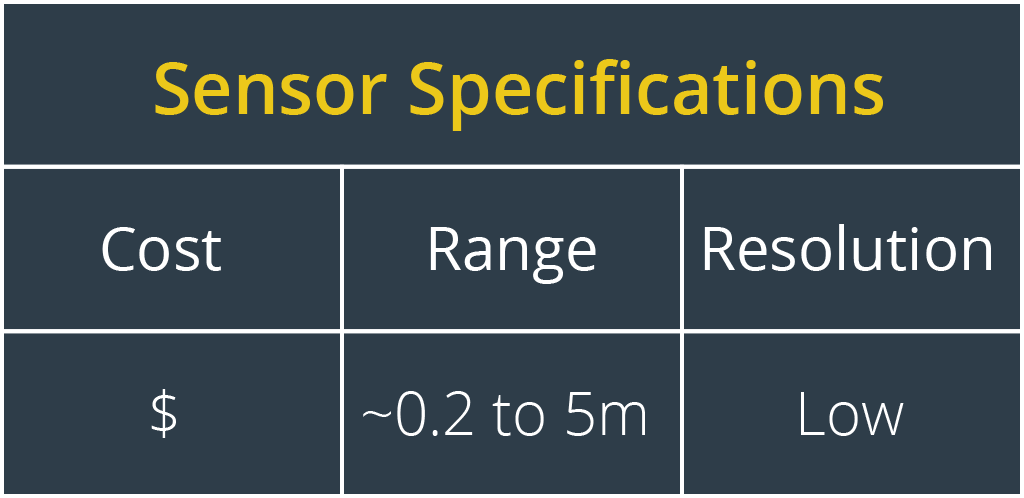
In addition, these sensors are inexpensive and have a simple USB plug and play interface. RGB-D cameras can be used for various applications ranging from mapping to complex object recognition.